1.1.浮动光伏和热损失系数
浮动光伏发电(FPV)是一种很有前途的新兴太阳能应用。它最初是一个利基市场,但现已发展成为一个快速增长的领域,并呈现指数级增长。到2022年,累计装机容量已升至5.7GWp,较上年增长68%[ 1 ]。 FPV 的一个经常被描述的好处是,与陆基光伏组件相比,光伏组件的工作温度较低 [ 2 ]。
光伏组件的工作温度影响功率转换效率。电池效率可以使用以下等式[ 3 ]得出:
η c是电池效率,η ref是参考温度下的电池效率,β是取决于具体电池技术的温度系数,T c (°C) 是电池温度,T ref (°C) 是电池温度。参考温度(通常为 25 °C,因为这是标准测试条件的温度)。
由于电池效率与光伏组件的功率输出直接相关,IEC61215-2 [ 4 ] 描述了光伏制造商应如何测试其光伏组件以确定温度系数,该温度系数可用于计算与温度相关的功率输出光伏组件:
其中P mod (W) 是模块的功率输出,P stc (W) 是模块在标准测试条件 (STC) 下的功率输出,γ(每 °C 的分数)是模块的温度系数(前提是模块制造商根据 IEC61215-2 标准计算),T mod (°C) 为模块温度,T stc (°C) 为模块在 STC 时的温度,即 25 °C。
已经提出了许多模型来估计模块温度。斯科普拉基等人。提供了这些模型的全面概述[ 5 ]。目前现场使用两种主要模型来估算光伏组件的工作温度。第一个是所谓的桑迪亚模型,由 King 等人开发。 [ 6 ]。这是一个具有凭经验确定参数的传热模型。
其中,a是根据经验确定的系数,确定低风速和高太阳辐照度下组件温度的上限,b是根据经验确定的系数,确定组件温度随风速增加而下降的速率,v (m/s)是测得的风速,T amb (°C) 是环境空气温度。
光伏组件的工作温度也可以通过能量平衡来解释。根据模块效率和光学损耗调整的太阳辐照度会引起模块与周围空气之间的温度变化。这种差异取决于模块有效耗散热能的能力,由热损失系数表示[ 7 , 8 ]。能量平衡模型有许多迭代,但 PVsyst 模型得到了广泛采用。这主要是因为它是计算指定地点光伏系统年发电量的一个组成部分,使其在行业内得到广泛应用。
其中T cell (°C) 是电池温度,α表示吸收的太阳光谱部分,G (W/m 2 ) 是入射太阳辐射,U c 是辐射热损失系数 (W/m 2 K) ,U v为对流热损失系数(W/m 3 Ks),v为10 m高度处的风速(m/s)。
重要的是要认识到,虽然 PVsyst 中使用的温度模型通常估计电池温度,但桑迪亚模型侧重于预测模块温度。然而,这两个温度值可以使用 King 等人描述的方法进行关联。 [ 6 ]。
G 0代表1000 W/m 2的参考辐照度,而Δ T表示1000 W/m 2辐照度下电池与模块背面温度之间的温差。
多项研究调查了(浮动)光伏系统的热行为和热损失系数。为了计算光伏系统的年发电量,商业软件包PVsyst对不同类型的系统(开放式机架系统、完全绝缘的背面)使用不同的热损失系数。这些值基于瑞士七个不同光伏系统的测量数据[ 9 ]。主要记录了不受风影响的单一热损失系数。这些非常适合一阶方法。然而,验证地点的风况仍不清楚,因此应用这些热损失系数的适当风况存在不确定性。刘等人。 [ 10 ]利用新加坡的 FPV 测试台,强调了不同浮动结构导致的 FPV 系统热损失系数的变化。记录了陆上和海上地点之间的风速差异;然而,这种差异并没有转化为 FPV 系统与风相关的热损失系数。 Dörenkämper 等人。 [ 11 ] 确定了荷兰和新加坡多个示范规模 FPV 系统的风相关和风无关热损失系数。尚未报道不同尺寸系统的直接比较。林德霍尔姆等人。 [ 12 ] 和 Kjeldstad 等人。 [ 13 ] 探索了 FPV 系统的热动力学,其中膜将模块与水面分开,消除了任何气隙。这导致热损失系数非常高,但这种系统设计非常具体,不是主流。蒂娜等人。 [ 14 ]研究了单面和双面浮动光伏电池板之间热行为的差异。该系统装机功率约为8kW,相对较小。表 1提供了不同热损失系数值的概述。
1.2.目标
准确计算 FPV 系统的年产量需要将适当的 FPV 特定热损失系数纳入模型中,正如 Dörenkämper 等人所证明的那样。 2023 年[ 15 ]。因此,本文通过介绍不同系统类型的 FPV 特定热损失系数,为该领域的知识库做出了贡献。此外,这项工作旨在填补文献中现有的空白,特别是在评估 FPV 系统尺寸对 FPV 系统热动力学的影响方面。这些目标将通过对两个容量约为 50 kWp 的示范规模 FPV 系统以及容量约为 2 MWp 的公用事业规模 FPV 系统进行比较分析来实现。通过对这些不同尺度的热性能进行分析,将深入了解它们各自的热特性。正在研究的两个演示级 FPV 系统的面板方向有所不同:一个配备单轴方位角跟踪系统,另一个则具有东西方向的模块。商业规模的 FPV 系统与东西面板方向设计非常相似,为直接评估这两种不同规模之间的热行为提供了机会。
此外,本手稿旨在探索将水体温度纳入能量平衡 FPV 模块温度模型。鉴于FPV领域相对新颖,水温对FPV模块工作温度的影响尚未用热损失系数来表达。本文旨在设计这样一个模型,并讨论它为理解 FPV 系统热行为带来的可能性和附加价值。
2.1.演示级 FPV 系统
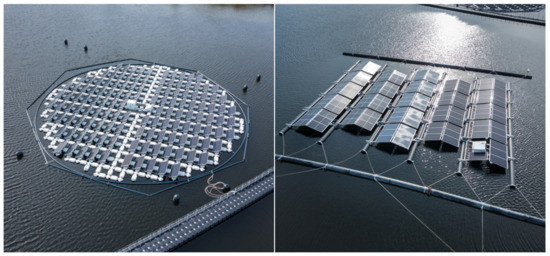
这两个演示规模的 FPV 系统是位于荷兰 Oostvoorne 湖的“绿色经济现场实验室”的一部分[ 16 ]。该湖紧邻北海,面积约270公顷。这两个系统在浮动结构和模块方向方面有所不同。图 1描述了两种安装方式。左侧所示的系统由葡萄牙公司 SolarisFloat 设计和建造,采用方位角跟踪机制。该图右侧为荷兰Solar Float公司开发的东西向FPV系统。在湖泊旁边(陆地一侧)安装了一个气象站 (Lufft WS500),距离两个 FPV 系统约 80 m。该气象站有助于测量环境温度以及风速和风向。
图 1. 两个演示级 FPV 系统的图片,左侧为 Solarisfloat 系统的方位角跟踪 FPV 系统,右侧为 Solar Float 的东西向 FPV 系统[ 17 ]。
2.1.1. Solarisfloat FPV 系统:开放式结构
Solarisfloat 系统是一种方位角跟踪 FPV 系统,容量约为 50 kWp。每个(单晶 PERC)光伏组件的额定功率为 390 Wp。该系统由 128 个倾斜角为 25° 的光伏组件组成,分为八个不同的组串。这些串连接到陆基逆变器(SMA Sunny Tripower STP 50-40 型号)。为了提供浮力,每个模块都安装在铝框架上,而铝框架又连接到几个互连的浮子上。光伏模块朝向单侧的方向形成开放式结构,使风能够冷却模块的后侧并有助于散热。为了全天跟踪太阳,该系统能够绕其中心旋转。这种旋转是通过水中的多个螺旋桨来实现的。为了监控光伏系统的热行为,在选定模块的背面安装了多个 Pt100 温度传感器。此外,阵列平面 (POA) 辐照度是使用 A 级 EKO MS-802 日射强度计测量的。使用横河GM10数据记录仪记录从各个传感器收集的所有数据,时间分辨率为1分钟。数据存储在本地,然后每 24 小时上传到中央服务器。在本研究中,使用 2021 年 1 月至 10 月期间的测量数据进行分析。
2.1.2.太阳能浮式:封闭式结构
Solar Float 系统是一个 ~50 kWp 东西向光伏系统,倾斜角为 15°。每两个模块连接到一个功率优化器。功率优化器连接到两个陆基逆变器 (SolarEdge 16K)。该单一系统中使用了多种类型的光伏模块。然而,研究热行为的光伏组件均为单晶 PERC 类型,额定功率为 315 Wp。该系统的浮力由圆柱形高密度聚乙烯(HDPE)浮子提供。由于光伏组件呈东西向,结构相对“封闭”。 PT100 型温度传感器安装在多个选定光伏组件的后侧,这些组件位于系统的西北角。东侧的阵列平面 (POA) 辐照度由 EKO MS-802 A 级总辐射表测量,西侧的 POA 辐照度由 EKO ML01 光电二极管测量。日射强度计和热电偶连接至横河电机 GM10 数据记录仪。数据以 1 分钟的时间分辨率存储在本地,并每 24 小时上传到中央服务器。在本研究中,使用 2021 年 1 月至 12 月期间的测量数据进行分析。
2.2. Groenleven 商业规模 FPV 系统:封闭结构
Groenleven 的商业规模 FPV 系统位于荷兰 Oosterwolde 村附近的一个占地约 23 公顷的采沙湖上。该系统由5748块双玻单晶双面组件组成,每块组件额定功率为365Wp,总装机功率为2.1MWp。图2给出了 FPV 系统的视觉表示。模块以东西向配置安装,倾斜角度为 12°。模块串连接到一组逆变器(华为 36KTL),这些逆变器位于 FPV 系统本身。 FPV 系统由相互连接的“船”组成,每个船包含 12 个模块。为了确保浮力,使用 HDPE 浮子,并用金属结构包裹以提供必要的支撑。测量设置由多个组件组成。 Lufft WS600 UMB气象站用于测量环境温度、风速和风向,提供全面的环境数据。此外,还使用两台 A 级 EKO MS-80 日射强度计来记录 POA 辐照度。为了监控模块温度,PT100 传感器安装在几个有代表性的位置(系统的西侧)。水温也使用 PT100 传感器测量。所有收集到的数据都会传输到中央测量柜,该测量柜与中央数据服务器进行通信。数据以 2 分钟的时间分辨率存储在本地,随后每 24 小时上传到中央服务器。在本研究中,记录了 2021 年 4 月至 2022 年 3 月期间的测量数据并用于分析。
图 2. 位于 Oosterwolde 的 Groenleven 的商业规模 FPV 系统 [ 18 ]。
3.1.数据集和过滤
测量数据以 10 分钟的时间步长聚合。对于热损失系数的计算,仅包括POA辐照度大于250 W/m 2期间的数据点。此外,仅考虑光伏系统的运行时间。
3.2.风速高度
风速可能会根据距地面的海拔和地形的粗糙度而显着波动。在 Oostvoorne,风速是在大约 3 m 的高度处记录的,而在 Oosterwolde,风速是在距地面约 1.5 m 的高度处测量的。由于气象数据库中经常使用10 m的标准测量高度,因此将所有记录的风速调整为对应于10 m的高度,使用以下公式[ 19 ]:
变量V 10是模拟的10 m 高度处的风速(m/s),而V meas表示测量的风速(m/s)。参数z 0是指表面的粗糙度长度(m),z meas表示测量风速的高度(m)。粗糙度长度取决于表面类型和所调查的景观。测量是在开放水体附近进行的。因此,采用0.03 m的标准粗糙度长度值,该值通常与没有障碍物的草地或开阔场地相关。
3.3.以水温为变量的温度模型
为了研究地表水温对光伏组件温度的影响,我们使用了回归相关法。该方法基于稳态能量平衡方法,考虑了水温。 FPV 模块的稳态传热方程可以表示为
其中G poa是以 W/m 2为单位的入射辐照度,为组件效率,U c为独立热损失系数,单位为 W/m 2 K,v为风速,单位为 m/s,U v为风相关热损失系数,单位为 W/m 3 Ks,U w是与地表水温度相关的热损失系数,单位为 W/m 2 K。
由于模块电转换效率η与温度相关,请参见方程 (1),因此可以重写此热平衡方程来计算建模的模块温度,如下所示:
仅使用来自商业规模 Groenleven 系统的温度数据来检验该模型,并将地表水温度视为变量。
4.1.晴朗天气下不同系统的热行为
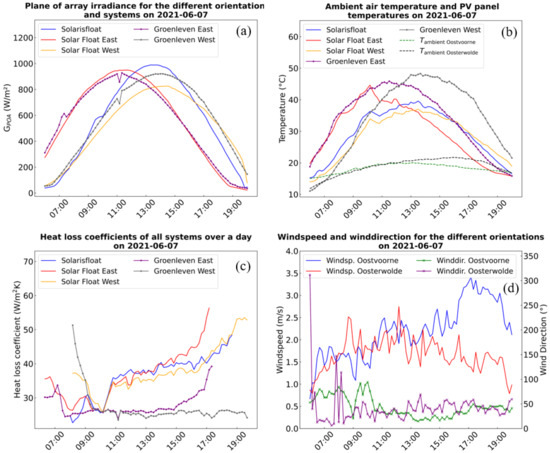
图 3显示了两个不同研究地点在晴朗天气期间各种 FPV 系统的热动态。图 3a、b还描述了计算热损失系数所需的不同气象参数。在日出后和日落前的时段,观察到未面向太阳的光伏组件的工作温度低于环境空气温度(图3b)。这种差异是由模块的热辐射引起的,目前热损失系数方程中忽略了这一因素,导致低辐照度期间热损失系数升高,并且热辐射成分主导了模块的热行为。光伏组件。
图 3. 一天内不同系统的环境气象条件和热行为。显示了 POA 辐照度 ( a )、环境空气和面板温度 ( b )、风速和风向 ( c ) 以及计算的热损失系数 ( d )。
在这一天,Solarisfloat 系统面向西方,并且没有太阳跟踪,这可以在 G POA辐照度数据中看到(图 3a),当比较 Solarisfloat 和 Solar Float west 的辐照度数据时。检查全天热损失系数的趋势(图 3 c)表明,在上午 10 点至下午 4 点之间,Solarisfloat 和 Solar Float 系统的系数比 Groenleven 系统高出约 10 W/m 2至 15 W/m 2上午 9 点和 10 点,这些系数具有可比性。上午 10 点,东福恩的风向显着从东风转向东北风(图 3d),增强了光伏组件沿线的风向,可能有助于更有效的冷却。上午 10 点至中午 12 点期间,Oostvoorne 和 Oosterwolde 的气象条件非常相似,包括风向、风速和环境温度。尽管 Groenleven 和 Solar Float 东模块的 G POA辐照度相当,但在上午 10 点时在 Solar Float East 模块中观察到测得的面板温度较低。这种差异强调了 Solar Float 系统对风向的严重依赖,并且对风向的依赖程度较小。 Groenleven 系统的范围。
4.2.1.与风向无关
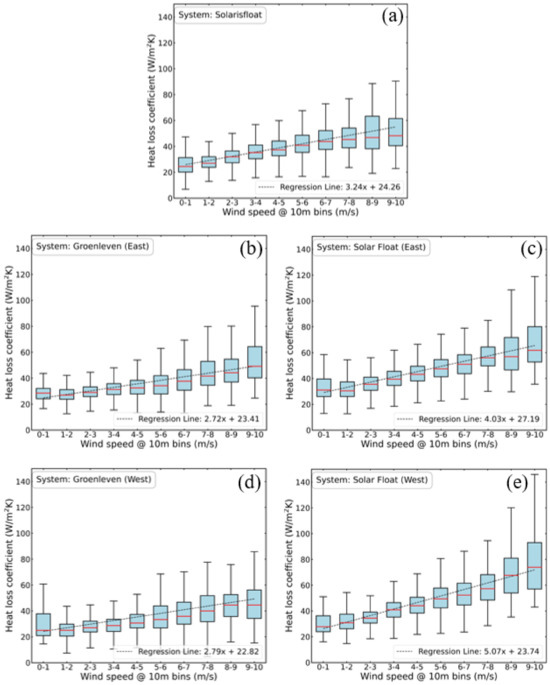
图 4中显示的箱线图显示了分类为 0 至 10 m/s 范围内的各种风速箱的热损失系数,每个箱的跨度为 1 m/s。可视化风速对热损失系数的影响。此外,还描述了整个数据集的线性回归,并附有表示该线性回归的方程。线性回归的结果也以数字形式显示在表 2中,显示了各种 FPV 系统以及 Groenleven 和 Solar Float 系统的不同面板方向的与风无关的U c分量和与风相关的U v分量。关注这些配件的U c分量可以发现,不同系统之间的差异相对较小,范围为 22.8 至 24.3 W/m 2 K,但朝东的 Solar Float 系统除外,该系统记录的值为 27.2 W/m 2 K 2 K. 当考虑与风相关的U v热损失系数时,系统之间的区别变得更加明显。 Groenleven 系统在这方面表现出最低值,而 Solar Float 表现出最高值。 Solarisfloat系统的U v值介于两者之间。
图 4. 热损失系数随风速变化的箱线图以及所研究的不同光伏系统的线性回归结果(( a ) Solarisfloat,( b ) Groenleven(东),( c ) Solar Float(东),(d)Groenleven(西),(e)太阳能漂浮(西))。
表 2. 使用线性回归确定的不同光伏系统的热损失系数概述。
Solar Float 和 Groenleven 系统之间观察到的差异值得注意,因为它们的面板方向和系统设计相当相似。这表明这些系统的不同规模可能会发挥重要作用。值得注意的是,较小的太阳能漂浮系统似乎更容易受到风的冷却效应的影响,导致它们各自的风相关热损失系数存在差异。此外,在比较 Solarisfloat 和 Solar Float 系统时,Solar Float 系统设计中固有的封闭结构意味着风有效冷却其模块后侧的潜在挑战。尽管有这一特性,Solar Float 系统的风相关U v值仍超过 Solarisfloat 系统。
4.2.2.风向依赖性
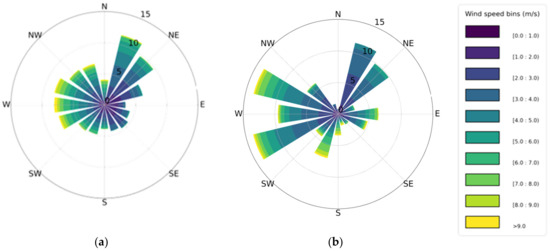
图 5显示了测量活动期间两个测量地点(Oosterwolde 和 Oostvoornse 湖)的风玫瑰图。值得注意的是,盛行的强风主要来自西风,而西南方向的风明显缺乏。为了探索风向对风相关热损失系数的影响,在数据集之前应用了基于风向的附加过滤机制(“北”包括西北到东北,“东”从东北到东南等)。进行线性回归拟合。与风无关的U c值在整个拟合过程中保持恒定,并且使用在原始拟合中确定的U c值(如第 4.2.1 节所示)。
图 5. 风玫瑰图指示不同地点的风向和风速(占总数据集的百分比):Oosterwolde ( a ) 和 Oostvoorne ( b )。
这些拟合的结果见表3。尽管上一节中观察到的总体趋势仍然存在,但值得注意的是,与 Groenleven 系统相比, Solar Float 系统的风相关热损失系数要高得多(5.0 和 6.0 W/m 3 Ks)当风具有来自北方的方向分量时,系统(1.6 和 1.7 W/m 3 Ks)。这一优势可能是由于系统规模较小以及被测模块的位置(Solar Float 系统为西北,Groenleven 系统为西)而促成的,允许风更有效地从下方通过,从而促进背面的对流冷却。为了完整起见,列出了 Solarisfloat 系统的结果。然而,由于与系统旋转相关的间歇性操作问题,导致系统相对于风向的方向不确定,因此从这些结果中得出任何结论是具有挑战性的。
4.3.水温热模型
Groenleven 系统作为建模的基础,研究水温对模块温度的影响(方程(8))。该分析涵盖了 100 至 1300 W/m 2的 POA 辐照度,纳入了 2021 年 4 月至 2022 年 3 月的测量数据。此外,需要说明的是,与上一节相反,本次分析中使用了测量的风速,其中风速建模为 10 m 高度。所得回归模型提供了表 4中所示的系数。
表 4. 五个模块的回归模型结果(根据不同的热损失系数)。
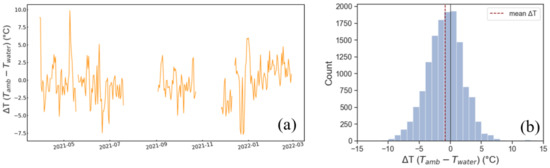
观察到的系数U w的变异性代表取决于地表水温的热损失系数,在略为正值和略为负值之间波动。这表明 FPV 模块的冷却影响有限,具体取决于水的表面温度,特别是在该特定测试场地和环境条件下。值得注意的是,在此设置中,水并不直接与模块表面接触。此外,还观察到:在监测期间,记录的水温徘徊在环境温度附近,高于和低于环境温度的持续时间大致相等。如图 6所示,其中显示了整个测量活动期间的日平均温差(根据辐照度加权)(图 6a)以及直方图(图 6b)。这表明由于水面温度与环境空气温度相比较高和较低,FPV 模块会产生加热和冷却效应。
图 6. 整个测量活动期间的环境空气温度减去地表水温(根据辐照度加权) ( a ) 以及显示这些温差的直方图 ( b )。
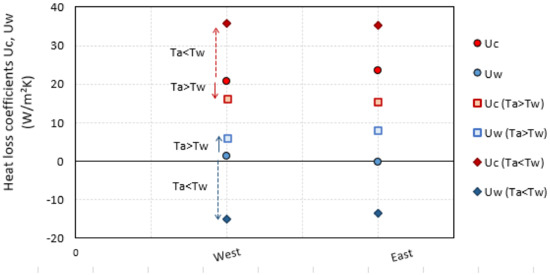
在回归模型中,我们仅关注T amb > T w可能导致U w增加且U c成比例减少的数据点。相反,我们仅考虑T amb < T w的数据点会导致U w显着下降和U c显着增加,如图7所示。然而,在不考虑U w(从而排除水温影响)的情况下进行模型将主要导致U c系数的重新调整。此调整可确保两个系数的组合和 ( U c + U w ) 保持大致恒定。这表明热损失系数U c和U w密切相关。
图 7.不同数据集下系数U c和U w 的变化(无滤波器,T amb > T w,T amb < T w)。
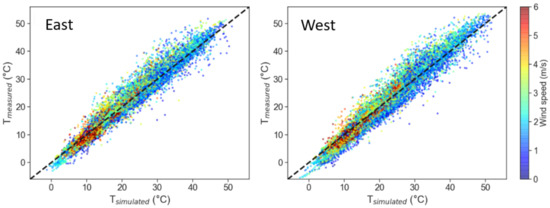
使用等式(6)中描述的模型测量和模拟的模块温度值的散点图以及热损失系数(如表4所示)如图8所示。黑色虚线充当眼睛的引导,其中建模的模块温度等于测量的模块温度。颜色条代表风速。总体而言,散点图表明该模型在预测值和测量值之间提供了良好的拟合。 R 2值约为 0.96–0.97。
图 8. 散点图显示了所有考虑的模块的测量T模块与模拟 T 模块之间的比较,作为风速的函数(颜色条)。
五、结束语
这项研究通过确定各种系统的热损失系数,有助于更广泛地了解浮动光伏 (FPV) 系统的热行为。 Solar Float演示系统表现出明显更高的热损失系数,尤其明显的是其与风相关的热损失系数显着升高,分别为4.0和5.1 W/m 3 Ks。相比之下,Groenleven 系统在系统设计方面具有可比性,表现出较低的风相关热损失系数,分别为 2.7 和 2.8 W/m 3 Ks。对这种行为的进一步研究揭示了与风相关的热损失系数的差异,特别是在北风方向上明显,这表明风对太阳能漂浮演示系统的测量模块具有更有效的对流冷却效果。这可能是由于与 Groenleven 系统的测量模块相比,风在 Solar Float 系统的光伏模块下方流动的能力增强。 Solarisfloat 系统的热损失系数略低于 Solar Float 系统,但高于 Groenleven 系统。研究结果表明,在选择风相关热损失系数来确定预计年发电量时,除了考虑系统设计外,还需要考虑FPV系统的尺寸。
研究地表水温对 Groenleven FPV 系统热行为的影响涉及将水温相关变量纳入能量平衡方程。通过线性回归,改变了三个热损失系数——U c 、 U v和与水温相关的U w值。研究结果表明,虽然水温会影响光伏板温度,但地表水温通常会超过环境空气温度,尤其是在秋季。这种情况限制了水对FPV面板的冷却效果。在环境空气温度低于水温的情况下,水的存在会导致光伏电池板在更高的温度下运行。重要的是要注意使用这三个值进行多元线性回归的挑战。U c和U w值之间观察到的可互换性增加了该分析的复杂性。